[딥러닝 스터디] Auto Encoder에 대해서 알아보자
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torchvision import transforms, datasets
import torch
import torchvision.datasets as dsets
import torchvision.transforms as transforms
import torch.nn.init
from torch.utils.data import DataLoader
import numpy as np
import matplotlib.pyplot as plt
from PIL import Image
import cv2
transform = transforms.Compose([transforms.ToTensor()])
trainset = datasets.FashionMNIST('~/.pytorch/F_MNIST_data/', download=True, train=True, transform=transform)
testset = datasets.FashionMNIST('~/.pytorch/F_MNIST_data/', download=True, train=False, transform=transform)

train_loader = DataLoader(trainset,batch_size=128,shuffle=True,drop_last=True)
test_loader = DataLoader(testset,batch_size=128,shuffle=False)
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
torch.manual_seed(156)
if device =="cuda":
torch.cuda_manula_seed(156)
모델 구현
class Autoencoder(nn.Module):
def __init__(self):
super().__init__()
self.encoder = nn.Sequential(
nn.Linear(28*28,128),
nn.ReLU(),
nn.Linear(128,64),
nn.ReLU(),
nn.Linear(64,12),
nn.ReLU(),
nn.Linear(12,3),
)
self.decoder = nn.Sequential(
nn.Linear(3,12),
nn.ReLU(),
nn.Linear(12,64),
nn.ReLU(),
nn.Linear(64,128),
nn.ReLU(),
nn.Linear(128,28*28),
nn.Sigmoid(),
)
def forward(self,x):
encoded = self.encoder(x)
decoded = self.decoder(encoded)
return encoded,decoded
model = Autoencoder().to(device)
optimizer = torch.optim.Adam(model.parameters(),lr=0.01)
criterion = nn.MSELoss()
view_data = x[:5].view(-1,28*28)
for epoch in range(10):
model.train()
avg_loss = 0
for i,(x,target) in enumerate(train_loader):
x = x.view(-1,28*28).to(device)
y = x.view(-1,28*28).to(device)
target = target.to(device)
encoded,decoded = model(x)
loss = criterion(decoded,y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
avg_loss += loss / len(train_loader)
print("epoch : {}일때 loss : {}".format(epoch+1,avg_loss))
시각화
fig,ax = plt.subplots(2,5,figsize=(10,5))
for i in range(5):
img = np.reshape(view_data.numpy()[i],(28,28))
ax[0][i].imshow(img,cmap="gray")
ax[0][i].set_xticks(())
ax[0][i].set_yticks(())
for i in range(5):
img = np.reshape(decoded_data.detach().numpy()[i],(28,28))
ax[1][i].imshow(img,cmap="gray")
ax[1][i].set_xticks(())
ax[1][i].set_yticks(())

Denoise Auto Encoder

def add_noise(img):
noise = torch.randn(img.size()) * 0.3
noisy_img = img + noise
return noisy_img
for epoch in range(10):
model.train()
avg_loss = 0
for i,(x,target) in enumerate(train_loader):
noisy_x = add_noise(x)
noisy_x = noisy_x.view(-1,28*28).to(device)
y = x.view(-1,28*28).to(device)
target = target.to(device)
encoded,decoded = model(noisy_x)
loss = criterion(decoded,y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
avg_loss += loss / len(train_loader)
print("epoch : {}일때 loss : {}".format(epoch+1,avg_loss))
sample_data = x[:5].view(-1,28*28)
test_x = sample_data
_,decoded_data = model(test_x)
original_img = sample_data
noisy_img = add_noise(original_img)
_,recovered_img = model(noisy_img)
시각화
fig,ax = plt.subplots(3,5,figsize=(10,5))
for i in range(5):
img = np.reshape(original_img.numpy()[i],(28,28))
ax[0][i].imshow(img,cmap="gray")
ax[0][i].set_xticks(())
ax[0][i].set_yticks(())
for i in range(5):
img = np.reshape(noisy_img.numpy()[i],(28,28))
ax[1][i].imshow(img,cmap="gray")
ax[1][i].set_xticks(())
ax[1][i].set_yticks(())
for i in range(5):
img = np.reshape(recovered_img.detach().numpy()[i],(28,28))
ax[2][i].imshow(img,cmap="gray")
ax[2][i].set_xticks(())
ax[2][i].set_yticks(())

sample_data = x[0].view(-1,28*28)
original_x = sample_data[0]
noisy_x = add_noise(original_x)
_,recovered_x = model(noisy_x)
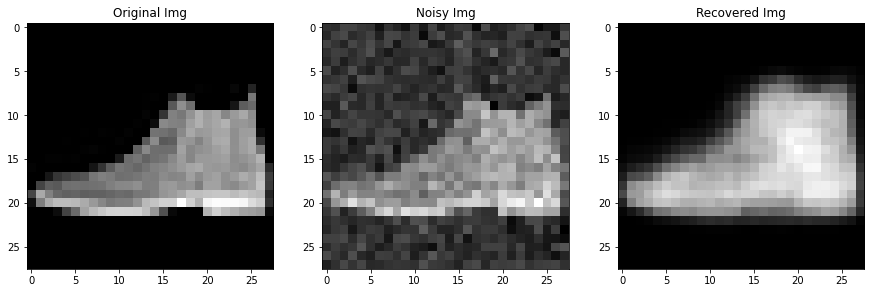
fig,ax = plt.subplots(1,3,figsize=(15,15))
original_img = original_x.view(28,28)
noisy_img = noisy_x.view(28,28)
recovered_img = recovered_x.view(28,28).detach().numpy()
ax[0].set_title("Original Img")
ax[0].imshow(original_img,cmap="gray")
ax[1].set_title("Noisy Img")
ax[1].imshow(noisy_img,cmap="gray")
ax[2].set_title("Recovered Img")
ax[2].imshow(recovered_img,cmap="gray")